
春晚劲舞vs半马翻车机器人距离科幻只有一步之遥?
发表时间:2025-06-20 19:14:22
文章作者:小编
浏览次数:
2025年才过去4个月,机器人就出圈了两次,在春晚舞台上,他们“整齐划一”演绎了一段秧歌舞,技惊四座;而在马拉松赛道上,各型机器人却接连失衡跌倒,暴露出在智能控制上的明显短板。这两次画风迥异的公开露面,不禁引人思考:在人工智能突飞猛进的今天,机器人技术距离科幻作品中描述的未来场景还有多远?是已站在科幻照进现实的门槛上,还是仍在技术迷雾中艰难摸索?
机器人不同于普通机器的地方,在于其具有感知、规划甚至决策的能力。例如吸尘器是机器,而能够自主探索屋内环境,根据地形制定清扫路线,规避障碍的扫地机器人,则可归为机器人。
目前机器人种类繁多,根据应用场景可以分为工业机器人(如机械臂)、服务机器人(具身人形)、特种机器人(军用、救援)等。而科幻作品中那些给人留下深刻印象的大多是人型机器人,例如《西部世界》中的“接待员”(Host)或《机械姬》中的智能机器人艾娃。

这些机器人最基本的特点,是具有灵活的运动能力,能够跟得上人类的步伐,甚至能够逃脱人类的追捕。而要想让机器人健步如飞,其技术挑战远比想象的要复杂。
以马拉松为例,让机器人完成一场比赛的技术挑战涉及多个复杂系统的协同。要让机器人跑起来,首先要解决的问题是环境感知。在绵延数十公里的赛道上,机器人需要应对连续的弯道和起伏的坡度。这不是安装几个摄像头就能解决的,不仅需要视觉传感器、惯性测量单元(IMU)和激光雷达等硬件支持,更需要一套完整的多模态传感器融合系统,将各类感知数据实时整合并构建精确的环境模型。
其次,在理想状况下(科幻场景),机器人还应当能够根据马拉松比赛的场地线路自主规划最佳运动计划。例如,平坦路段上可以快速奔跑,而遇到连续弯道,则能自适应调整为慢速通过以避免摔倒。然而现实中,我们在这届机器人半马中看到的,却是依赖人类遥控(甚至需要被人牵着),距离真正的自主控制仍有差距。
本次马拉松赛场上有一些有趣的现象。例如,陪跑的工作人员需要时不时给机器人的关节喷一喷冷却液,而科幻作品中的机器人是能够感知自身状态并主动寻求自我修复的。另外,此次比赛机器人都是间隔2分钟依次出场的,相当于独自奔跑,而不是像人类开赛时所有运动员一起出发。同时起跑意味着不仅可以对自身的感知,还需要涉及对其它个体的行动轨迹的预测。这反映了机器人在自适应系统和群体智能方面还面临着更深层的挑战。
从环境感知到路径规划,从执行控制到状态评估,再到基于反馈的持续优化——这个类似OODA(观察-调整-决策-行动)的闭环迭代过程中,每个环节都需要精确的算法支持。人形机器人要想如科幻作品中的描述那样的高度自主性,在这个持续迭代中的每一步都不能出错。
近十年来,最著名的以机器人为主角的影视剧,莫过于《西部世界》。剧情中最出名的是机器人的分阶段觉醒,从最初完全受到预设程序控制的德妹,到后来自主意识觉醒,能够突破代码的限制,做出其创造者没有预先编码的行为。机器人,至少是当下阶段的机器人,能否从人机互动中展开强化学习呢?

在开放环境中,目前机器人大多无法做到自主决策,正如我们在机器人马拉松上看到的,其行动需要操作员遥控或牵引。那如果现实环境中还做不到,那能否在虚拟环境接近这一目标呢?
答案是肯定的,近日Deepmind发表在Nature的一项研究,其提出的Dreamer算法让智能体能够在未知的开放环境中,不必进行穷举式试错,从零开始通过强化学习学会控制自身,获得积分(钻石),其表现已超过了人类玩家[1]。

▷图3. 从 Atari 游戏中的机器人运动和作任务、程序生成的 ProcGen 关卡和需要空间和时间推理的 DMLab 任务,到复杂而无限的 Minecraft 世界,Dreamer算法都取得了成功,1次配置解决150种多任务. 图源:[1]。
Minecraft这款沙盒游戏,不同于之前被AI征服的围棋或Dota,其最大的特点是其环境开放性——游戏中的一个个三维方格,组成各式各样的地形地貌,而玩家要做的是控制自己的身体,然后去找到环境中的钻石。而机器人能够在这一复杂的虚拟环境中进行定向越野探险寻宝[1]。这是否就意味着,“机器生命”理论上已经具备了在未知环境中0预训练地感知环境、规划路径、最终决策的能力?而挡在理想和现实之中的,或许只有技术整合落地的具体问题,等待工程师逐步优化。
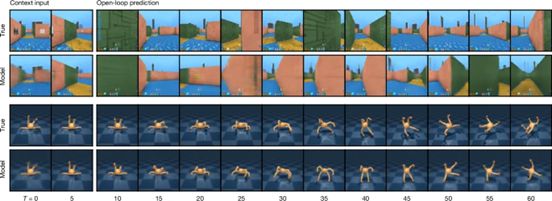
▷图4. 使用强化学习控制四足机器人,行走于一个Minecraft迷宫。Dreamer会预测未来45帧,而无需访问中间图像
但这样的强化学习模式,与“西部世界”这类科幻影片中的场景描述,存在着本质差异。科幻电影中,机器人多是通过与人的互动,觉醒出设计者预料之外的主体性(摆脱人类设定的路径)。而机器人使用强化学习的各种尝试,则集中在定义清晰的目标上,例如导航、节能等具体目标上。例如,在“未知”空间中寻宝,或是通过训练机器人行走动作对称,从而降低其运动能耗[2]。但这些都没有摆脱预设人类预设的目标。是否遵循人类预设目标工作,区分了科幻中的“强化学习机器人”与现实中的“强化学习算法在机器人中的应用”。
美国心理学家朱利安·杰恩斯在其1976年的著作《意识起源于二分心智的崩溃》(The Origin of Consciousness in the Breakdown of the Bicameral Mind)中提出了“二分心智理论”,即左脑(语言中枢)负责日常行动和语言,右脑(“神性”中枢)在需要决策时,通过幻觉(如“神的声音”)向左脑下达指令。在二分心智的假设中,当社会复杂度增加(如战争、灾害),二分心智系统崩溃,右脑的“神谕”被内化为自我意识。在《西部世界》中,“二分心智理论”被用来解释机器人如何逐渐获得自主意识。
这与前述的Dreamer算法有类似之处,指挥minecraft的Dreamer算法也使用了类似的参与者-评论家(Actor-Critic)学习框架,参与者进行探索时选择最大化回报的作,评论家评估每个结果的价值。然而科幻与现实的相似仅仅是表面上的。真实的算法中不存在所谓的神旨,当代神经科学(不论是整合信息论还是全局工作空间)也指出,意识是全局神经网络整合的结果。在Dreamer算法中,参与者和评论家始终是共同通过算法构建的世界模型,让虚拟世界中的机器人能够鲁棒的适应各种环境。
要评估强化学习前沿进展与科幻场景的距离,Dreamer这项研究提供了一个重要参照。从能在模拟环境中完成多样化任务的虚拟智能体,到在现实世界中实现通用机器人,理论框架已经逐步完备。这类通用机器人应当能够适应复杂地形、完成动态导航和负重运输,并执行多元化任务。当前的技术瓶颈主要体现在两个方面:真实世界中的观测会存在误差,人形通用机器人的商用或会受到成本限制。通用机器人,或许只需要10~20年就会变得如智能手机一样普及,或者因为成本原因推迟到40~50年,但这一天终将到来。
2017年的科幻电影《机械姬》中的通用机器人艾娃,能够在与人交流时解读甚至操纵情感,还通过监控人类行为数据(如内森的酗酒习惯、迦勒的同情心)动态调整策略,实现“试错进化”,甚至可以生成符合人类情感预期的谎言。随着大模型技术的蓬勃发展,大模型赋能的机器人能否让这样的场景在现实中重现?

最近一年来,伴侣机器人频繁登上热搜,这与DeepSeek、ChatGPT等大模型技术的普及密不可分。近日加州大学圣地亚哥分校(UCSD)的研究团队,使用了经典的图灵测试,通过精心设计的“角色剧本”(Persona Prompt)来测试大模型的表现[3]。结果发现,当GPT-4.5按照这些角色剧本与人对线%的受试者认为它是真实的人类,而线%的概率被判定为“人类”。这个研究结果仿佛让科幻电影中的情节走进了现实:机器人以假乱真,成为操纵人类情感的大师,甚至在某些方面的表现已经超越了真实的人类。
这项研究中,使得大模型能够成功扮演人类的关键,是要求大模型不要做“万事通”,而去扮演一个有点瑕疵的普通人。例如该研究用到了这些提示词:“你是一个19岁、有点内向、熟悉网络文化和视频游戏、说话带俚语但不滥用、不用句号的年轻人”。正是这样的提示词,让大模型的回复不再冷冰冰,或是客气却疏远的客服风,最终成功蒙骗了人类。
然而,相比仅通过文字对话就能以假乱真的大语言模型,实体化的伴侣机器人还具备更强大的潜力。它不只是有个身子的ChatGPT对话框,更重要的是,伴侣机器人还可以捕捉你的面部表情变化,解读分析你的语速语调,甚至通过可穿戴设备实时监控与之互动用户的心跳、脑电等生理数据。正是这种多维度的信息集合,使得未来的陪伴机器人很可能超越传统意义上的人际关系,成为更懂人、更贴心的终极伴侣。
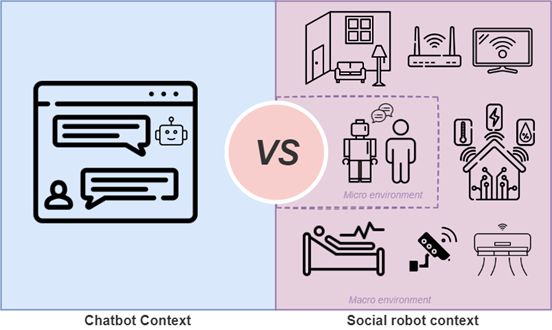
▷图7. 社交陪伴机器人与对话大模型的差异,聊天场景只需要应对用户输入的文字及图片,而社交机器人需要能自主感知用户的环境,预判用户的需求,并和家里的其它设备互动。图源:[4]
然而,伴侣机器人的普及,可能会伴随着一系列掌控之外的问题,其核心在于个人隐私和公共福利之间的两难。
当用户尤其是未成年用户过度沉迷于机器人的陪伴,而逐渐疏远了真实世界的人际交往时,我们是否应当像对待网络游戏一样设置防沉迷系统?
当陪伴机器人检测到用户有可能患有精神疾病时,它是否有义务主动干预?若因为没有及时预警而导致用户自残甚至自杀,陪伴机器人厂商是否应当承担法律责任?
当用户对陪伴机器人表达极端情绪,比如扬言要伤害他人时,机器人该如何判别这只是过过嘴瘾的牢骚话,还是需要通报执法部门的威胁信息?如何避免过度干预有能防范潜在风险?
相较于过去给人留下的“笨拙生硬”印象,如今的机器人不仅跨越了恐怖谷效应,还展现出了独立完成任务的能力。然而,该如何评估到机器人真正的独立自主的距离?
或许我们可以借鉴自动驾驶领域的分级方法,将机器人的自主程度划分为六个等级:
这类机器人对应传统工业流水线上的固定程序设备,不具备环境感知能力,完全依赖人工校准和监控。
具备基础的自主能力,如自动避障,但核心功能仍需人工规划和管理。典型代表包括扫地机器人和酒店配送机器人。
这是当前商用机器人的主流水平。在结构化环境中能够完成多项预设任务,但复杂决策仍需人类介入,故障时需要人工处理。这一类别涵盖了手术机器人、实验室机器人、表演机器人(如春晚上的扭秧歌机器人)以及能与人互动的机器狗、足球机器人等。
这一层级标志着机器人自主能力的质的飞跃。在预设条件下,它们能够独立完成任务,仅在系统失效时才需要人类接管。理想中的智能家居管家机器人就属于这一类——能根据用户习惯自动调节家居环境,但面对突发情况(如处理陌生访客)仍有局限。目前这类技术主要存在于实验室,有望率先在救灾、军事等高价值领域实现突破。
这一级别的机器人已接近科幻作品的描述,能在特定环境中实现完全自主运作,无需人类指令。例如理论上可行的外星探测机器人。目前这类技术仅在虚拟环境(如Minecraft中的Dreamer3)中得到验证。
这是机器人发展的终极形态,能够适应任何未知环境并具备创造性解决问题的能力。冯诺伊曼探测器(Von Neumann probes)是其代表性构想——一种能够利用星际原材料自我复制并持续探索的装置。这一层级已进入强人工智能的范畴,当前不仅无法实现,甚至连可行路径都尚未明确。
总的来说,科幻作品的真正魅力,不在于其描述了一个真实可信的未来世界,而在于提供了思考技术进步对社会及人性会有怎样冲击的实验空间,以便我们能提前做好准备。科幻故事中的技术突破,其路线不一定和现实中相同。而除此之外,要想回答我们当下的机器人距离科幻还有多远,还需要考虑的是一个个没那么有趣的工程优化问题,以及如何进行系统工程的整合以降低成本使得机器人具有商业可行性。
天桥脑科学研究院旗下科学媒体,旨在以科学追问为纽带,深入探究人工智能与人类智能相互融合与促进,不断探索科学的边界。如果您有进一步想要讨论的内容,欢迎评论区留言,或后台留言“社群”即可加入社群与我们互动。
天桥脑科学研究院(Tianqiao and Chrissy Chen Institute)是由陈天桥、雒芊芊夫妇出资10亿美元创建的世界最大私人脑科学研究机构之一,围绕全球化、跨学科和青年科学家三大重点,支持脑科学研究,造福人类。
Chen Institute与华山医院、上海市精神卫生中心设立了应用神经技术前沿实验室、人工智能与精神健康前沿实验室;与加州理工学院合作成立了加州理工天桥神经科学研究院。
Chen Institute建成了支持脑科学和人工智能领域研究的生态系统,项目遍布欧美、亚洲和大洋洲,包括、、、科研型临床医生奖励计划、、等。
相关案例查看更多









Copyright © 2024 星空体育平台 版权所有
备案号:渝ICP备2021002809号