
星空体育网站:工业机器人3种类型奇异点原理详解先天缺陷一定要远离奇异点
发表时间:2025-02-14 06:07:08
文章作者:小编
浏览次数:
机器人末端点位固定,但机器人有种姿势,也就是说机器人末端点位和机器人姿势不是一一对应的。
从数学理论方面看,机器人运动学方程逆运算时会有多个解,这时候,控制系统不知道哪个解去执行对应的动作。
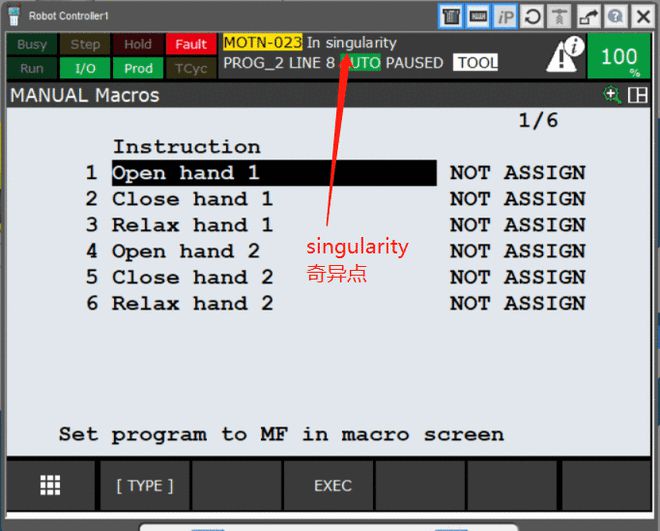
下面是日本FANUC机器人运动时遇到奇异点时发出的停机报警信息,示教器会提示“In singularity” 报警信息。
手腕奇异点发生在J4轴和J6轴重合时,也就是J5轴为0°时,手腕奇异点是关节机器人最容易遇到到奇异点。
将此文分享转发到朋友圈,集齐5个赞之后,将朋友圈截图通过公众号CAD2D3D发给小编,即送教材《工业机器人系统集成&自动化生产线方案设计大师》。
本教材全文共2.1万字,总计93页,主要包含机器人、自动化生产线概述、浇铸生产线方案设计、锻造生产线方案设计、机加工生产线方案设计、物流仓储以及各种自动化专机等,详细介绍机器人系统集成项目的方案设计 思路和方法。
评论处可以补充文章解释不对或欠缺的部分,这样下一个看到的人会学到更多,你知道的正是大家需要的……
相关案例查看更多









Copyright © 2024 星空体育平台 版权所有
备案号:渝ICP备2021002809号